お問い合わせ・ご相談・デモ機の体験申込は随時承っておりますので、お気軽にご連絡ください。
SCANeRの価格はPackの組み合わせにより大きく変わりますので、まずはお客様の実施したい内容やご予算をヒアリングさせていただき、最適なライセンス構成をご提案いたします。

本ページのリリースノートは、SCANeR™studioの開発元であるAVSimulationのリリースノートを和訳したものです。SCANeRの最新バージョンについて不明点がある場合や興味をお持ちいただけた場合は、当社までぜひ一度お問い合わせください。
SCANeR 2026.1リリースは、ADAS(先進運転支援システム)および自動運転プログラムが直面する主要な課題、すなわち異種モデルの統合、環境のリアリズム、テストキャンペーンの自動化、大規模なテストカバレッジに対応しています。
本バージョンは、SCANeRをオープンでモジュール式、産業グレードのシミュレーションプラットフォームとしてさらに強化し、最新の研究開発ワークフローにシームレスに統合できるよう設計されています。
スケーラブルなシミュレーションワークフローのためのよりオープンなアーキテクチャ
現代のシミュレーションチームは、複数のツールが混在する環境での運用、独自モデルの管理、自動化された検証パイプラインへの依存を必要としています。
SCANeR 2026.1は、性能やシステムの一貫性を損なうことなく、完全な相互運用性を備えたプラットフォームへと進化を続けています。
SCANeR 2026.1では新たなPythonモデルAPIが導入されました。C++ APIと同等の機能を提供しつつ、エンジニアリング、データ解析、AI分野で広く採用されているPython言語を活用します。
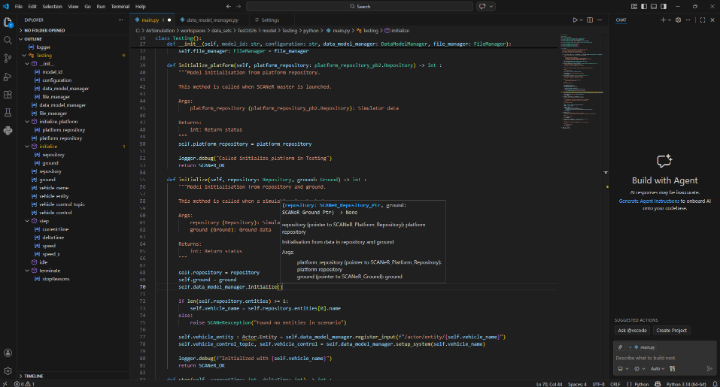
モデルやシステムの開発・統合に柔軟かつ適応可能
AIベースの認識スタック(Perception stack)とのシームレスな統合
オープンAPIによる産業パートナーの複雑さの低減
シミュレーションエンジニア、ADAS(先進運転支援システム)および自動運転チーム、データサイエンティスト
SCANeR PythonモデルAPIの詳細については弊社までお問い合わせください。
SCANeR 2026.1では、FMU Dynamicsを導入しました。これは、FMU(FMI)としてパッケージ化された車両運動モデルおよびシステムモデルをSCANeR環境内で直接実行可能にする新しいモデルタイプです。
FMUとしてパッケージ化された車両運動モデルおよびシステムモデルの直接統合
SCANeRデジタルビークルモデル内で直接実行可能
デジタルビークル、センサー、制御アーキテクチャとの完全な整合性
複雑なネットワークベースの同期メカニズムの排除
多数の信号を公開するFMUの統合を簡素化するため、SCANeR 2026.1では自動マッピング機能を導入しました。この機能により、FMUポートと互換性のあるSCANeRデータパスに自動的に接続されます。
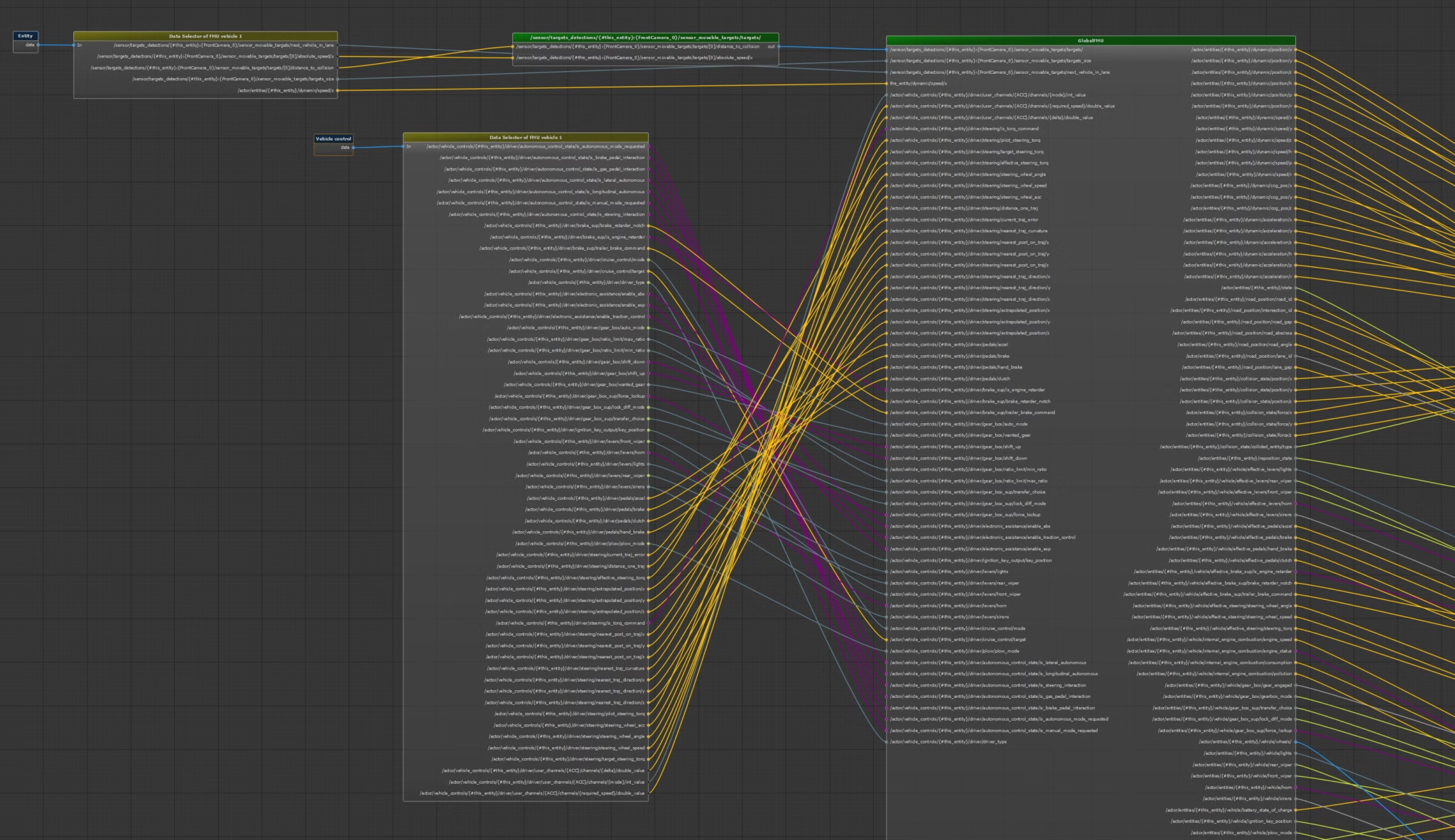
セットアップ時間の短縮(高速化)
手動によるエラーの削減
より堅牢で再現性の高い統合
FMUモデルのSCANeRへの統合方法
FMUモデルをSCANeRに統合する方法の詳細は当社までお問い合わせください。
SCANeR 2026.1では、「Guard HTTP API」を導入しました。これは、外部アクションや条件によってシミュレーション状態のマシン内遷移を一時的にブロック・検証できる柔軟な仕組みです。
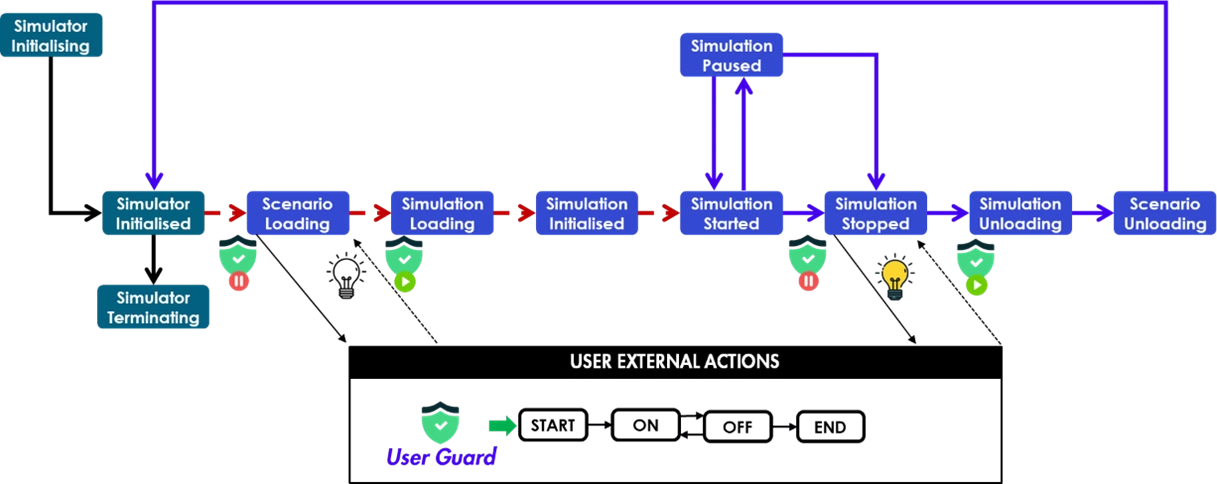
シミュレーションワークフローの高度なカスタマイズ
XIL(X in the Loop)における外部ハードウェア同期のトリガー
外部プロセスの実行
安全検証と前提条件の強制
運転シミュレーション結果の品質は、シミュレートされた世界の忠実度に依存します。SCANeR 2026.1は、特に重要な領域においてジオメトリの精度を大幅に向上させると同時に、モデリング作業の負担を軽減します。
実世界データから導出された交差点には、高低差の不整合が含まれることがあります。SCANeR 2026.1では、交差点サーフェス生成のための新たなワークフローを導入しました。

より滑らかで一貫性のある表面(路面形状)
軌跡上の凹凸の明確な可視化
車両の乗り心地を即座に評価可能
シミュレーションキャンペーン前のジオメトリ上の問題を早期に発見・修正できます。
新たなプロシージャル生成スタイルによって、より大規模で多様性のある現実的な環境が、高速かつ効率的なワークフローを維持しつつ、創出が可能になりました。
例:オランダ風レンガ造りの都市景観

例:近代初期のアメリカダウンタウン

最新のADASおよび自動運転車の検証には、パラメータ変動(天候、速度、距離、交通密度、センサー状態など)を伴う数千から数百万ものテストケースが関与することがあり、大規模なシミュレーションキャンペーンの実行が不可欠です。
しかし、不具合が検出された場合、エンジニアはすぐにキャンペーン全体を再実行するのではなく、問題の特定、分析、修正、再検証を行う必要があります。

SCANeR exploreでは、大規模キャンペーン内で選択した特定のテストケースのみを個別またはグループ単位で再実行することが可能になりました。
不具合分析の高速化
デバッグ時間の短縮
反復検証の効率化
SCANeR 2026.1ではシミュレーション実行中に直接KPI計算とレポート生成が可能となり、後処理作業を削減し意思決定の迅速化を実現します。
Euro NCAP 2026の新規格ではシナリオの増加と変動性の拡大が導入されます。
SCANeR 2026.1にはEuro NCAP 2026パックが含まれており、ユーザートライアル版で利用可能です。
目的:チームが安全評価の新規プロトコルへ先行対応を可能にし、検証範囲を拡大できるようにする。
オープンで相互運用可能なシミュレーションプラットフォーム
既存モデルの統合が容易化
環境描写のリアリズム向上
大規模検証の高速化・効率化
Euro NCAP 2026基準への事前対応
お問い合わせ・ご相談・デモ機の体験申込は随時承っておりますので、お気軽にご連絡ください。
SCANeRの価格はPackの組み合わせにより大きく変わりますので、まずはお客様の実施したい内容やご予算をヒアリングさせていただき、最適なライセンス構成をご提案いたします。
