
本ページのリリースノートは、SCANeR™studioの開発元であるAVSimulationのリリースノートを和訳したものです。SCANeRの最新バージョンについて不明点がある場合や興味を持っていただけた場合は、当社までぜひ一度お問い合わせください。

AVSimulationは、自動車シミュレーションソフトウェアパッケージの最新のメジャーバージョンであるSCANeR 2025.2(Powered by Next)のリリースを発表しました。エンジニアや科学者にとって最も困難なシミュレーションアプリケーションのニーズを満たすための多くの新機能と機能強化が含まれています。自動車業界における電気自動車の重要性の高まりを受け、本リリースでは、よりリアルで包括的なEVシミュレーション機能を提供するための戦略的な機能強化に注力しています。
AVSimulationの目標は、特にドライバーの行動研究やドライバー・イン・ザ・ループシミュレーション(driver-in-the-loop simulation=DILS)において、より正確で臨場感あふれる運転テストの実施を支援することです。
SCANeR 2025.2は、ビークルダイナミクスモデルであるCALLASを大幅に強化し、電気自動車シミュレーションを新たなレベルへと引き上げます。CALLASは、幅広い電動アーキテクチャとEV特有の高度な機能へのサポートを拡張し、実際の電気自動車の運転挙動をこれまで以上に容易にシミュレートできるようになりました。
これらの改良により、ワンペダルドライブモードや回生ブレーキといった強力な新機能が、様々なユーザー設定によって実現します。
電気自動車は新たな運転経験をもたらします。中でも最も特徴的な機能の一つがワンペダルドライブモードです。EV市場で広く採用されているこのモードでは、ドライバーはアクセルから足を離すだけで減速とエネルギー回生をすることが可能です。
CALLASでは、この機能が大幅に強化され、実際の挙動をより正確に反映できるようになりました。ユーザーは、アクセルペダル入力に対する電動モーターの反応をより柔軟にカスタマイズできるようになりました。これには、負のトルクを適用するタイミングを定義することで、減速とエネルギー回生を正確に制御することも含まれています。
包括的なEVシミュレーション体験を提供するというAVSimulationの取り組みの一環として、SCANeR 2025.2では、パラレルモード(parallel mode)、シリーズ(series mode)、カスタム制御モードを備えた新しい回生ブレーキ機能を導入しました。この機能追加により、ユーザーはより高度な制御と柔軟性を得ることができ、現実的な運転シナリオと車両挙動をより幅広くシミュレーションできます。
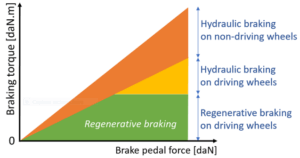
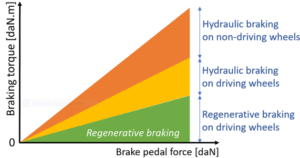
これらのアーキテクチャを物理ベースのシミュレーション環境で再現することで、SCANeRは快適性と効率性の両方に不可欠な、幅広いエネルギー回収戦略のシミュレーションをこれまで以上に容易にします。
正確なバッテリーモデリングは、現実的なEVシミュレーションの鍵となります。CALLASでは、2つの新しい高電圧バッテリーモデルが追加され、利用可能なシミュレーションオプションの幅が広がりました。
基本バッテリーモデルも改良され、ハイブリッドシミュレーションの精度向上のため、ユーザーが最小および最大の充電状態(State of Charge=SoC)を定義できるようになりました。
同時に、電動ドライブトレインコンポーネントライブラリにモーターとバッテリーのサンプルが追加されました。これにより、ユーザーはより幅広い定義済みアセットにアクセスでき、シミュレーションの妥当性を損なうことなく車両のセットアップを迅速化できます。
これらの主要な改善点に加え、SCANeR 2025.2 Powered by Nextはプラットフォーム全体で以下の更新を実装しています:電気モーター構成の強化、Computed Channelsを活用したデータ分析の向上(これにより、ユーザーはシミュレーション変数間の高度な操作を実行可能)、およびシミュレーションの使いやすさと互換性の継続的な改善
SCANeR 2025.2で自動車シミュレーションの未来を体験してください!
すべての更新内容の詳細な概要については、リリースノートをご確認ください。
お問い合わせ・ご相談・デモ機の体験申込は随時承っておりますので、お気軽にご連絡ください。
SCANeRの価格はPackの組み合わせにより大きく変わりますので、まずはお客様の実施したい内容やご予算をヒアリングさせていただき、最適なライセンス構成をご提案いたします。
