SCENARIOモード
新機能
1.新しいシナリオスクリプト関数:GetDataModelValue
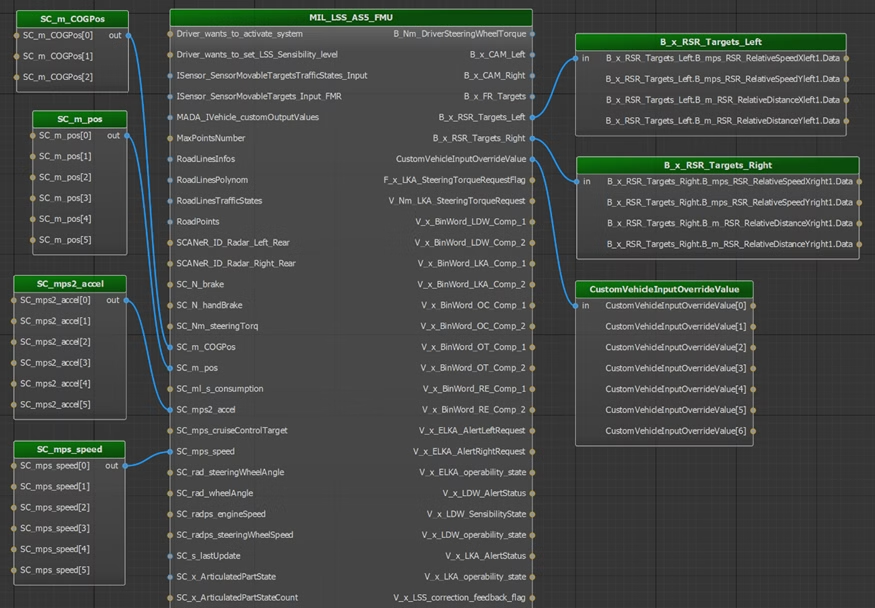
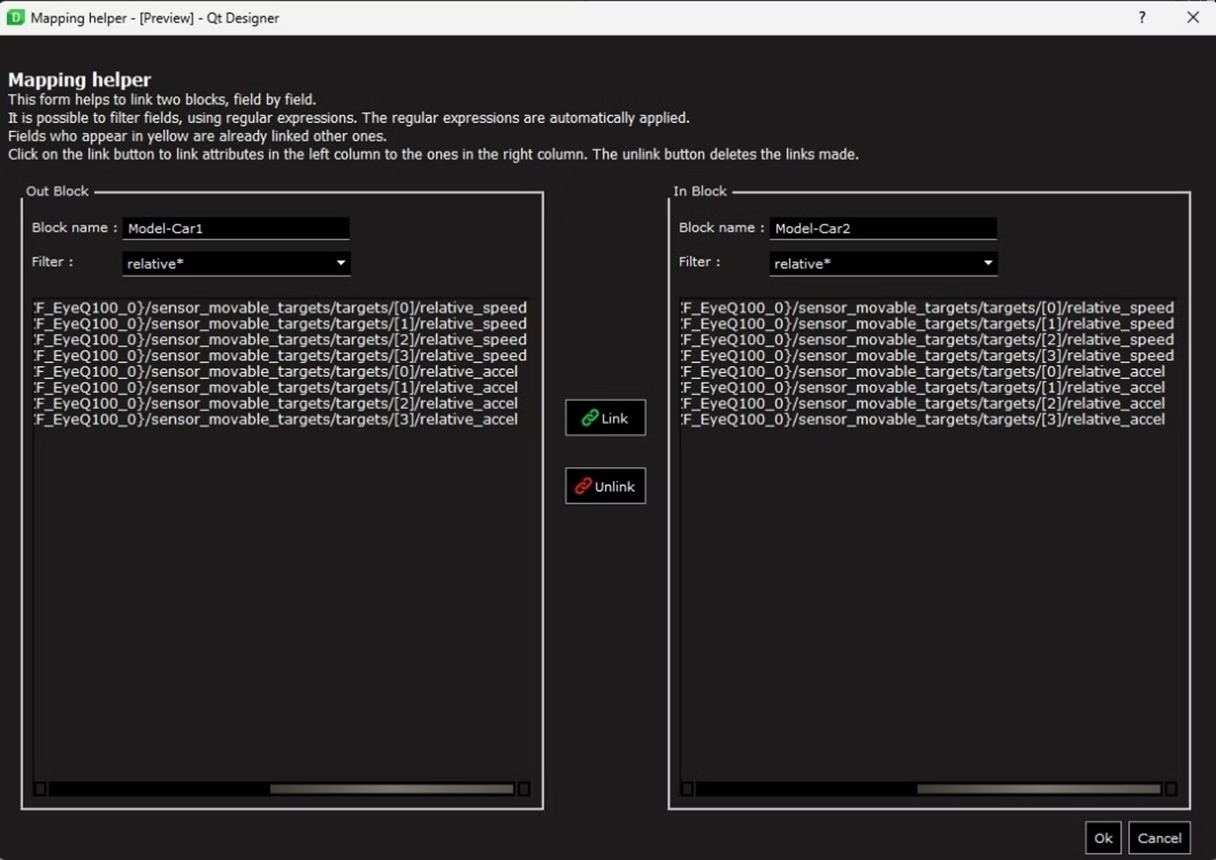
SCANeR Nextを使用すると、ユーザーはデータモデルを介してすべてのシミュレーション情報にアクセスできます。そこで、SCANeR 2024.2 (Powered by Next)に新しいスクリプト機能「Get Data Model Value」を導入し、スクリプト実行中にデータモデルから任意の値に簡単にアクセスできるように設計されています。
以前は、センサーデータなどの情報の取得は複雑で、シナリオスクリプトを通じてセンサー値に直接アクセスする方法がありませんでした。ユーザーは別の方法に頼らざるを得なかったため、メッセージの内容を正確に把握することは困難でした。この新機能により、ユーザーはデータモデルの値をMICEまたはPythonスクリプトに直接組み込むことができます。
たとえば、レーダーが100メートル以内の車両を検出したときに視覚的なアラートを送信するスクリプトを作成できるようになりました。この機能により、スクリプト作成がより強力かつ効率的になり、必要なすべてのデータにシームレスにアクセスできるようになります。
改善
2.SCANeR Exploreの新しいAPI
SCANeR 2024.2 (Powered by Next)は、SCANeR BatchToolsと従来のSCANeR Explore APIの機能を1つの強力なツールに統合したSCANeR Explore用の新しいAPIを備えています。この新しいAPIは、ユーザーがシミュレーションプロジェクトをより効率的に操作できるように設計されており、スクリプトを通じてSCANeR BatchToolsでの実行を可能にします。これらの機能を統合することで、より合理的でまとまりのあるエクスペリエンスを提供し、ユーザーがシミュレーションをより簡単かつ柔軟に自動化および制御できるようにします。
SIMULATIONモード
新機能
1.カスタムドライバー
SCANeR 2024.2 (Powered by Next)では、ユーザーがシナリオでドライバーの行動をより柔軟に制御できるようにしたいと考えました。実際、一部のユーザーは、シナリオ中にドライバーの行動を簡単に変更でき、ドライバーが特定の車両モデルに適応するのに十分な汎用性を備えている必要があります。
このカスタムドライバー機能の最初のバージョンは、ユーザーが一連のドライバーで構成されるデジタルドライバーを作成できるようにすることで、これらのニーズに対応します。最初のドライバーはユニークで、常にトラフィックタイプです。その後、ユーザーはFMUまたはCosimタイプの「Secondary」ドライバーを無制限に追加できます。コマンドはこれらのドライバーを順番に通過し、最終的なドライバーがコマンドを車両に配信します。
このセットアップにより、ユーザーはセカンダリドライバーを使用して、スクリプトからアクセスできるカスタムチャンネルを追加したり、車両タイプに基づいてコマンド値を調整したりできるため、さまざまなシナリオでの汎用性と適応性の両方が向上します。
この機能は完全に機能しますが、現在はベータ段階にあります。まだ完璧ではないかもしれないと認識しており、将来のバージョンでの改善に積極的に取り組んでいます。
2.新しいレコードフォーマット
SCANeR 2024.2 (Powered by Next)では、パフォーマンスを大幅に向上させるように設計された新しいレコードフォーマットを導入しています。「scpackz」と呼ばれるこの新しいフォーマットは、録画をプレビューできない、Analyzing Toolsが開かない、ファイルサイズが大きすぎるなど、長時間の録画で発生する問題に対処します。より圧縮されたscpackzフォーマットを採用することで、ユーザーは顕著なパフォーマンスの向上を実感できます。そのため、SCANeRの統合ツールを使用した記録の取り扱いと分析が大幅に改善され、よりスムーズで効率的なワークフローが確保されました。
3.NDIを使用したUnrealのストリームダッシュボード
SCANeR 2024.2 (Powered by Next)は、Unrealウィンドウの上に直接スクリーンオーバーレイをストリーミングする機能(NDIツールを使用)も備えています。この機能により、ユーザーはUnrealビュー内でダッシュボードをストリーミングするなど、追加の視覚要素をシームレスに統合できます。これにより、ユーザーはシミュレーションのリアルさとインタラクティブ性を高め、より没入感のある体験を提供できます。
改善
4.パフォーマンスの向上
精度、効率、速度が重要な自動車分野のエンジニアにとって、厳しい要求を満たすためには、優れたパフォーマンスを発揮するシミュレーションソフトウェアが不可欠です。そのため、SCANeR 2024.2 (Powered by Next)は、その前身であるSCANeR 2024.1およびSCANeR 2023.4と比較して、大幅なパフォーマンス向上を実現したことを誇りに思います。
これらの改善を実証するために、一連のテストを実施しました。センサーを搭載した車両1台と周辺車両50台でシミュレーションを行い、60秒後にシミュレーションが終了する停止基準を設定しました。シミュレーションの読み込みと初期化にかかった合計時間を測定しました。その結果、SCANeR 2024.2 (Powered by Next)では、モデル化されたさまざまなセンサーで大幅なパフォーマンス向上が見られ、継続的な改善とより効率的なシミュレーション体験の提供に対するAVSimulationのコミットメントが強調されています。
| Sensor
|
SCANeR 2023.4:
合計時間(秒) |
SCANeR 2024.2:
合計時間(秒) |
SCANeR 2023.4と
比較したゲイン(%) |
| Camera |
114 |
65 |
43 |
| Lidar VLP16 |
125 |
68 |
46 |
| Ultrason |
98 |
62 |
37 |
さらに、SCANeR 2024.2 (Powered by Next)は、計算時間のパフォーマンスが向上しただけでなく、IHM応答時間も改善されました。
TERRAINモード
改善
1.カメラビューとマップ探索方法の改善と一貫性
SCANeR 2024.2 (Powered by Next)は、ターゲットの概念を導入し、カメラビューのエクスペリエンスが向上されています。これにより、ユーザーはマップ上の関心のあるポイントを簡単に見つけて移動できます。ターゲットを選択するだけで、ユーザーは目的の場所にシームレスにフォーカスを移すことができ、効率的で直感的な探索が可能になります。

さらに、すべてのカメラでコントロールを標準化し、一貫性のあるユーザーフレンドリーなインターフェースを提供しています。この統一性により、アクセスするカメラに関係なく、ナビゲーションとインタラクションがスムーズで予測可能なものとなり、全体的なユーザビリティが大幅に向上します。