SIMULATIONモード
新機能
1.モデルとツール
このバージョンでは、SCANeRアーキテクチャの新しい概念が定義され、より優れた柔軟性とパフォーマンスの向上を実現した。
以前のバージョンでは、すべての機能がモジュールとして実装されていましたが、SCANeR 2024.1 Powered by ne><tでは、モデルとツールが区別されています。
この新しい区別により、パフォーマンスが向上し、たとえばシミュレーション中にツールを起動できるなど、ソフトウェアの取り扱いが向上します。
シミュレーション中のツールの使用例:
2.SCANeRアーキテクチャ
この新しいバージョンは、データストリームの管理を行い、必要とするさまざまなモデルやツールをロードする役割を持つ実行可能ファイルであるSCANeRランタイムを備えています。これにより、あらゆる構成において最適化された柔軟性とパフォーマンスが得られます。
その結果、モデルとツールは、SCANeRネットワークシミュレーションバスを介してではなく、SCANeRランタイムを介して相互に通信するようになります。

クラスター構成では、異なるランタイムのみがネットワークを使用して相互に通信します。
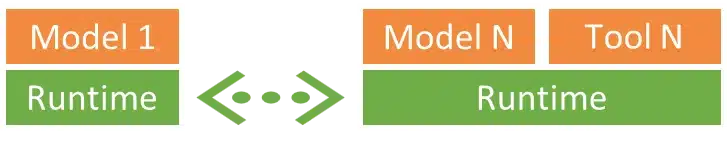
したがって、ネットワーク構成は必要な場合にのみ使用され、ソフトウェア全体のパフォーマンスの向上につながります。
3.モデルの自動選択
SCANeR 2024.1 Powered by ne><tでは、モデルはシナリオと"Digital Vehicle"から自動的に推定されます。この機能により、モデルを手動で選択する必要がなくなるため、シミュレーションをより適切かつ簡単に扱うことができるようになります。
次のビデオは、SCANeRランタイムによってロードされるモデルが、選択したシナリオに応じてどのように変化するかを示しています。
4.新しい時間管理
SCANeR 2024.1 Powered by ne><tに実装されたさまざまな新機能の1つは、統合されたスケジューラコンポーネントを特徴とする強固な時間管理システムです。
これにより、ユーザーは追加のモジュールを必要とせずに、リアルタイムシミュレーションから非リアルタイムシミュレーションに簡単に切り替えることができます。さらに、クロックサーバーの概念により、マスター/スレーブアーキテクチャとの互換性が保証されます。
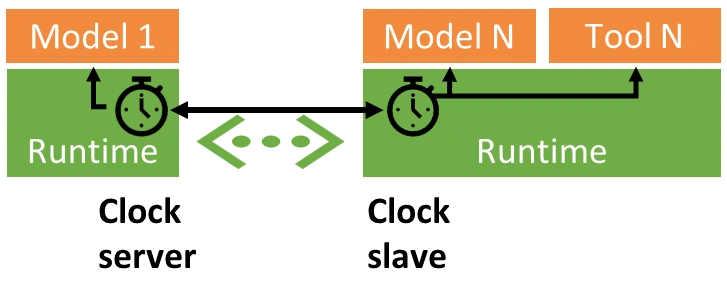
したがって、以下に示すように、シミュレーションの実行中にシミュレーション速度を変更できます。
新しい時間管理機能により、以前のSCANeRバージョンのアーキテクチャでは不可能だった並列計算の実行が可能になります。
データ
新機能
1.統一されたデータモデル
以前のバージョンでは、モジュールはネットワークシミュレーションバスまたは共有メモリを使用して、さまざまなタイプの情報、つまりさまざまなタイプのメッセージを共有していました。
現在、SCANeR 2024.1 Powered by ne><tでは、共有されるすべての情報が構造化データモデルに保存されるため、シミュレーション全体を表すことができます。
この新しいデータモデルの概念は、明確に構造化され、組織化されたデータストレージを提供します。
このデータモデルの興味深い点は、次のようなすべてのSCANeR機能で統一して使用されるようになった点です。
- マッピング(FMU、RTGateway)
- ControlPadと分析ツール
- スクリプト
- SDK
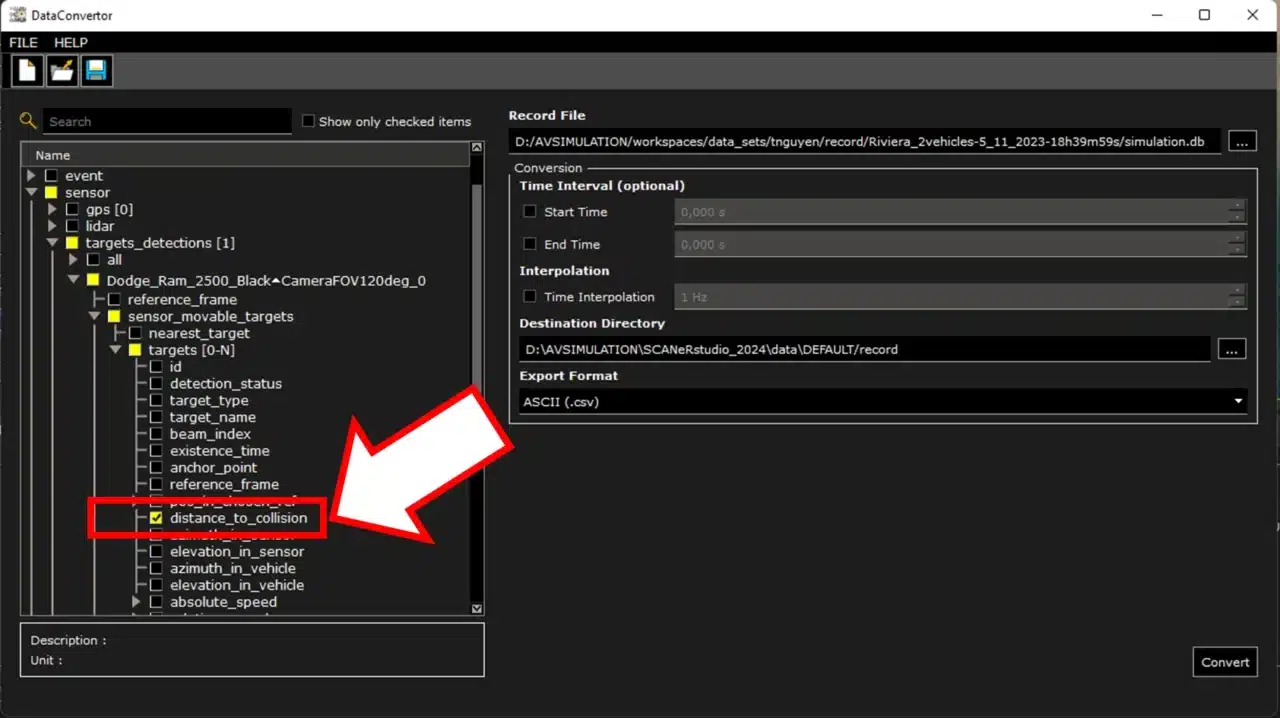
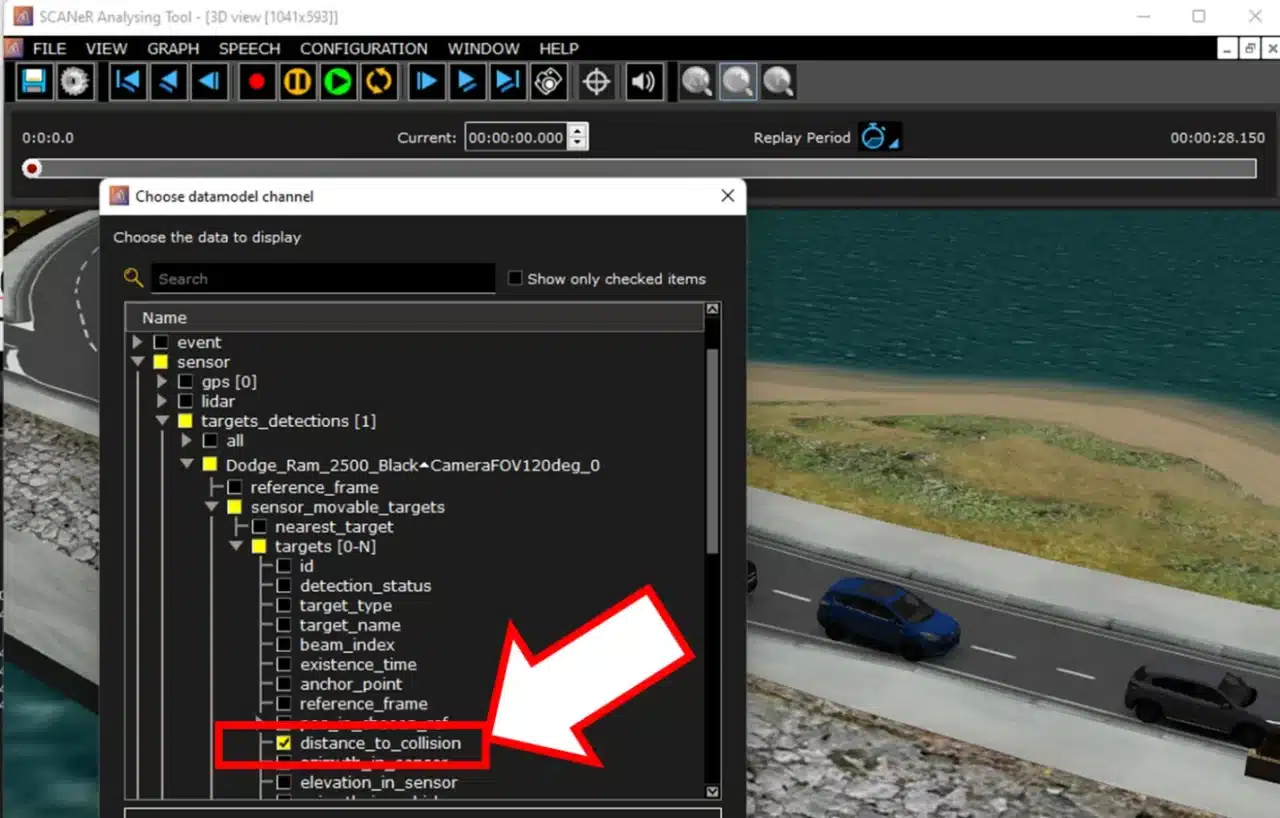
次のビデオは、このデータモデルによって、たとえばControlPadのセンサー出力に簡単にアクセスする方法を紹介しています。
同じデータモデルを使用して、DataConvertorとAnalyzingToolで同じ情報にアクセスできます。
2.レコードフォーマットの統一
SCANeRには常に2つのレコードフォーマットがありました。
- SCANeR Recordによって提供される.gzファイル
- Modelhandlerによって提供される.egファイル
SCANeR 2024.1 Powered by ne><tでは、これら2つのレコードフォーマットがSQL lite結果データベースに統合されました。
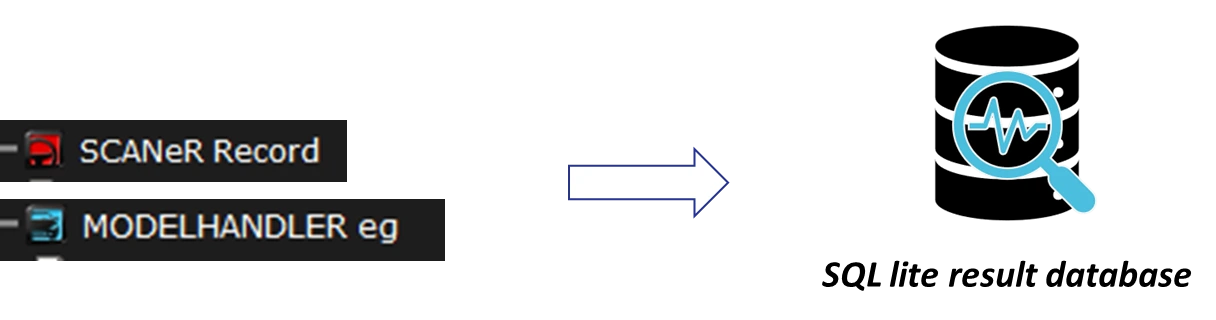
この標準形式は、前に示したデータモデルで構造化されており、DB BrowserなどのSQL lite互換のオープンソースツールで開くことができるため、データへのアクセスと抽出が容易になります。
3.データの構成
以前のSCANeRバージョンではコンフィグレーションにデータとコンフィグレーションファイルが混在していましたが、SCANeR 2024.1 Powered by ne><tでは、コンフィグレーションはシミュレーター/テストベンチにのみ関連し、コンピューター上のモデルとツールの割り当ておよび特定のオプションを扱います。
さらに、データはワークスペースに整理されるようになりました。
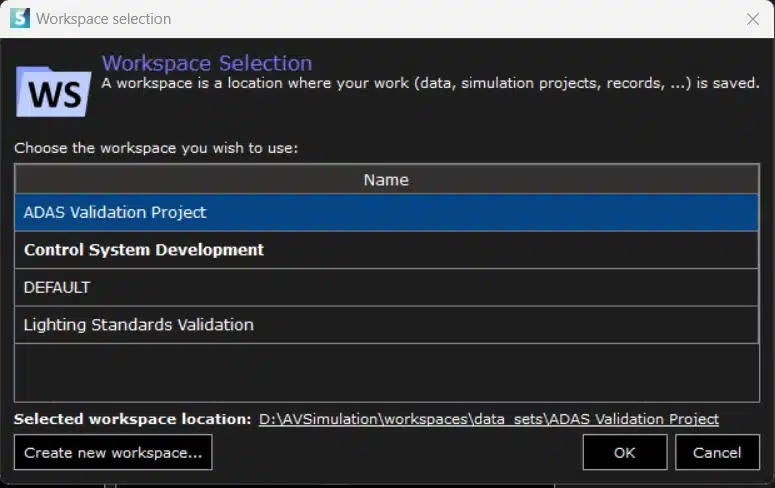
ワークスペースには多くの利点があります。
- すべてのユーザーデータ(シナリオ、システム、KPIなど)が含まれる
- どこにでも設置可能
- ワークスペース間の依存関係が明確である
- パッケージ化や共有が簡単
- 現在のワークスペースには、SCANeRを通じて常にアクセスできる
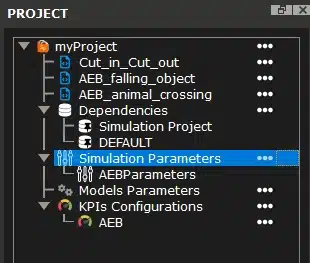
4.シミュレーションプロジェクト
一部のプロジェクトでは、シナリオごとに異なるシミュレーションを計算する必要がある場合があります。このため、SCANeR 2024.1 Powered by ne><tではシミュレーションプロジェクトを作成できます。
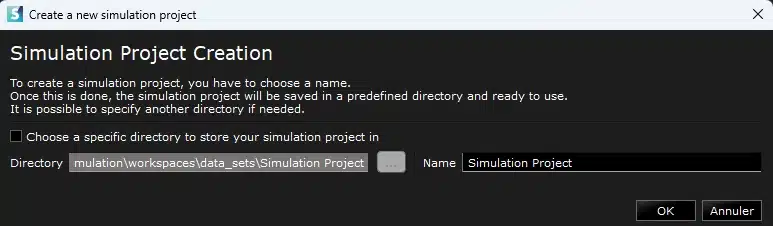
シミュレーションプロジェクトは、シミュレーションデータを整理する簡単な方法です。これはスタンドアロンであり、次の利点があります。
- 複数のシナリオを含めることができる
- すべてのパラメータ(モデルとシミュレーションパラメータ、KPI)を収集する
- 共有と展開が簡単
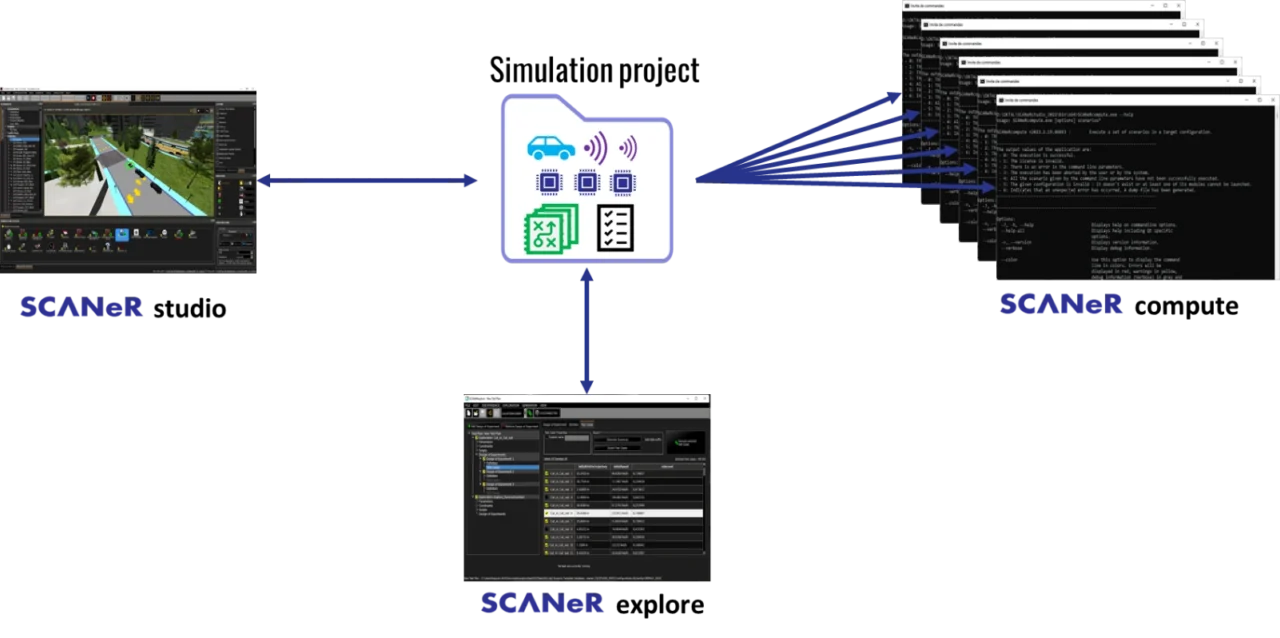
最後に、シミュレーションプロジェクトはSCANeR ExplorerおよびSCANeR computeとも互換性があります。
VEHICLEモード
新機能
1."Digital Vehicle"コンセプト
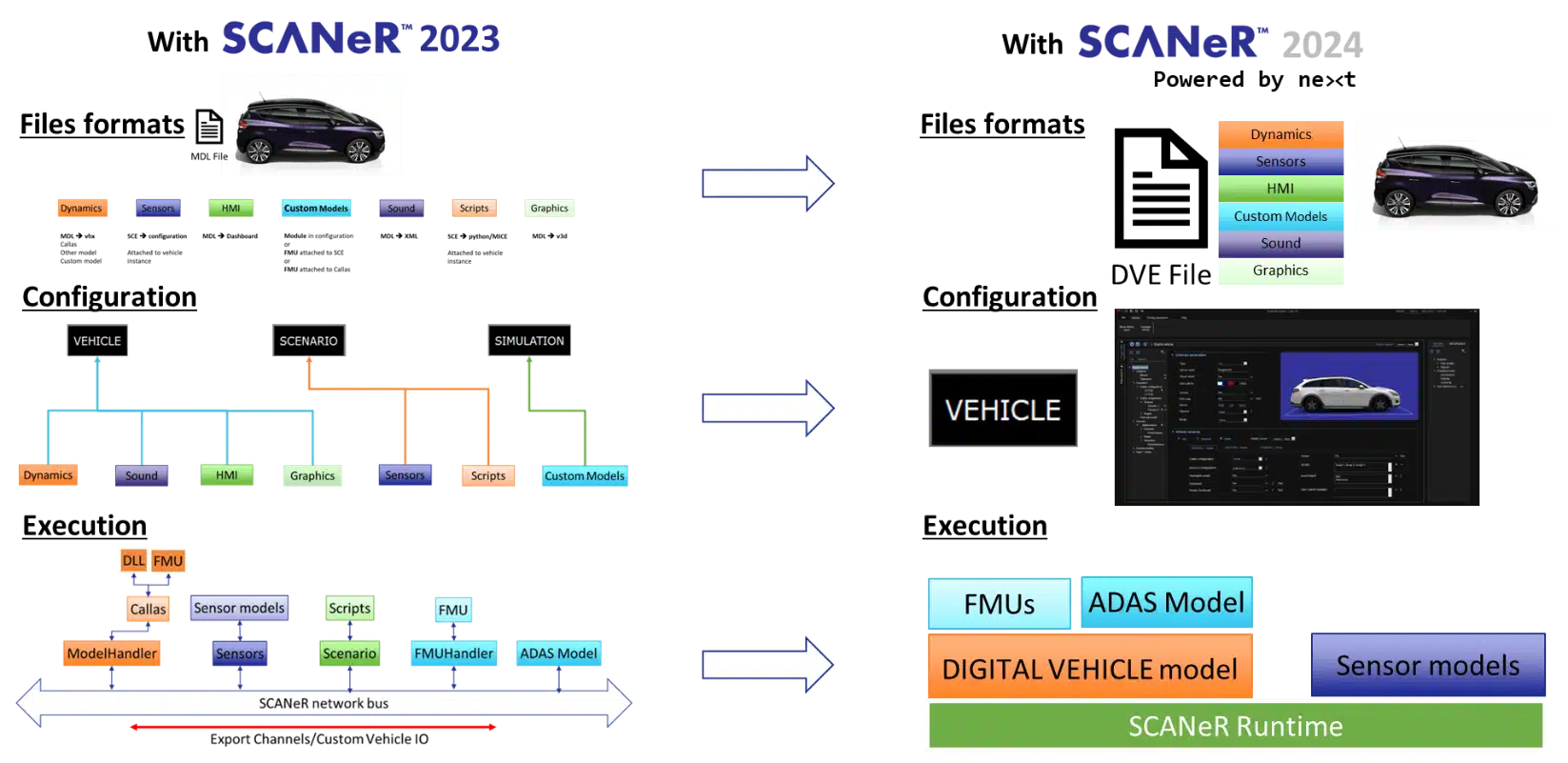
SCANeR 2024.1 Powered by ne><tは、より優れていて、より簡単な車両コンセプトを提供することができる"Digital Vehicle"のコンセプトを導入しました。この新しい"Digital Vehicle"コンセプトは、ソフトウェアのパフォーマンスと柔軟性を向上させる複数の良い変更をもたらしました。
まず、車両情報(ダイナミクス、センサー、グラフィックスなど)を記述するために必要なさまざまなファイルフォーマットが、単一のDVEファイルフォーマットに統合されました。
さらに、車両のすべての状況をVEHICLEモードから設定できるようになりました。SCENARIOモードを使用してセンサーを追加したり、SIMULATIONモードを使用しADASなどのカスタムモデルを追加する必要がなくなるため、設定時間を大幅に短縮できます。
これらの新機能により、VEHICLEモードが改善されました。以前に比べ、より多くのパラメーターが含まれていますが、それでも簡単な指示案内を提供します。さらに、3Dインタラクティブビューにより、これらのパラメーターをより深く理解できるようになります。
2.FMUマッピング
SCANeR 2024.1 Powered by ne><tは、ADASなどの統合システムにおける当社の改善を示しています。
前述したように、現在はすべてがVEHICLEモードで行われています。さらに、RTGatewayを介してFMUパラメータにアクセスするのに苦労したため、FMUマッピングエディタを実装しました。
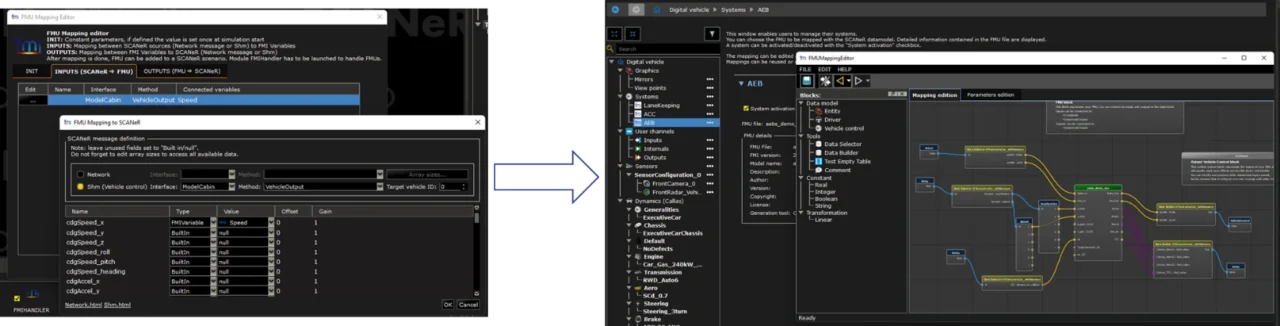
これは、単純なマッピングを可能にするブロックベースのエディターです。それに加えて、FMUマッピングエディターは前に紹介したデータモデルを使用するため、デモンストレーション動画のようにあらゆる情報に簡単にアクセスできます。
UXD Engine(Unrealによる)
注:UXD Engineは、まだすべてのSCANeRユースケースに対応できるわけではありません。このため、Open Scene Graphに基づくオリジナルのVISUALモジュールは引き続き利用可能です。
Unreal Engine 5
レンダリング品質の向上
Unreal 5はSCANeR 2024.1 Powered by ne><tに正常に統合され、全体的なレンダリング品質を向上させるいくつかの新機能を提供します。
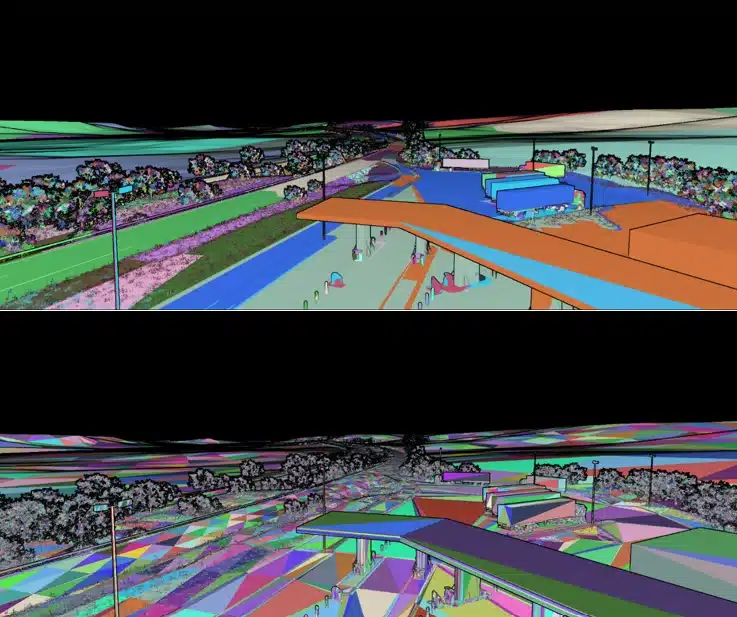
まず、新しいレンダリングテクノロジであるNaniteがあります。LOD(Level Of Detail)を、メッシュで管理する新しい動的方法に置き換えます。
マップN104に適用されたUXD EngineのNaniteビューの2つのバージョン:
グローバルイルミネーションの新しいライティングモデルであるLumenもUnreal 5にあるもう1つの優れた機能です。

さらに、Unreal 5では、Virtual Shadow Mapと呼ばれる新しいシャドウマッピング方法を紹介しています。一貫性のある高解像度のシャドウイングを実現するために使用されます。

Unreal 5には、AIを使用してパフォーマンスを倍増するニューラルグラフィックステクノロジであるNVIDIA DLSS 3.5と、レンダリングを向上させるnDisplayも搭載されています。