インストール
新機能
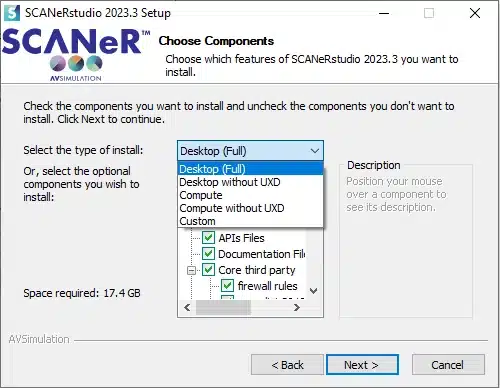
新しいインストールプリセット
このバージョンでは、SCANeRインストール用の新しいプリセットが定義されており、ユーザーの意図した使用例により適合します。
プリセットは次のとおりです。
- Desktop (Full): SCANeR の完全なインストール
- Desktop without UXD:UXDレンダリングに関連するファイルはインストールされません。UXDレンダリングを使用しない(または使用できない)と確信しているユーザー向けです。
- Compute:クラウドコンピューティングの目的でSCANeRを使用したい人向け。この使用例では、ドキュメント、サンプル、APIファイルなどの未使用のファイルはインストールされません。
- Compute without UXD:上記と同じですが、UXDレンダリングの使用率に関連するファイルもインストールしません。
- Custom:どのファイルのセットをインストールするかを手動で選択できます。
LinuxでSCANeRをFullまたはComputeプリセットで展開するためのスクリプトも利用できます。
TERRAINモード
新機能
人間工学
ユーザーが道路を作成および修正するために役立つ、いくつかの機能を追加しました。
ユーザーは、新しい部分を作成せずに、道路に沿った境界線のオフセットを変更できるようになりました。
道路に沿った点や接線を変更できます。
この機能は、OpenDriveでインポートし生成した際に変更箇所を少なくするためにも使用できます。
レーンを自動的に作成または削除する別のツールを追加しました。
車線の作成では、選択した車道と車線に応じて、さまざまな提案ができます。新しい車線は、選択した車線と同じ道路スタイルを使用します。
レーンを減らす:
 UXDエンジン(Unrealによる)
UXDエンジン(Unrealによる)
注:UXDエンジンは、まだすべてのSCANeRユースケースに対応できるわけではありません。このため、Open Scene Graphに基づくオリジナルのVISUALモジュールは引き続き利用可能です。
改善
レンダリング品質の向上
異なるシャドウレベル間のスムーズな移行を保証するためにシャドウレンダリングを改善しました。また、あらゆる状況をより表現できるように、Unreal Engineの空とシーンのグローバルライティングのいくつかのパラメーターを変更しました。
上記の変更に伴い、より多くの影とより詳細な品質が得られるようになりました。
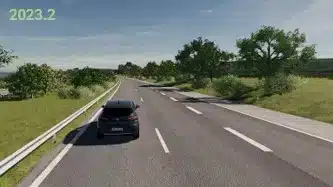
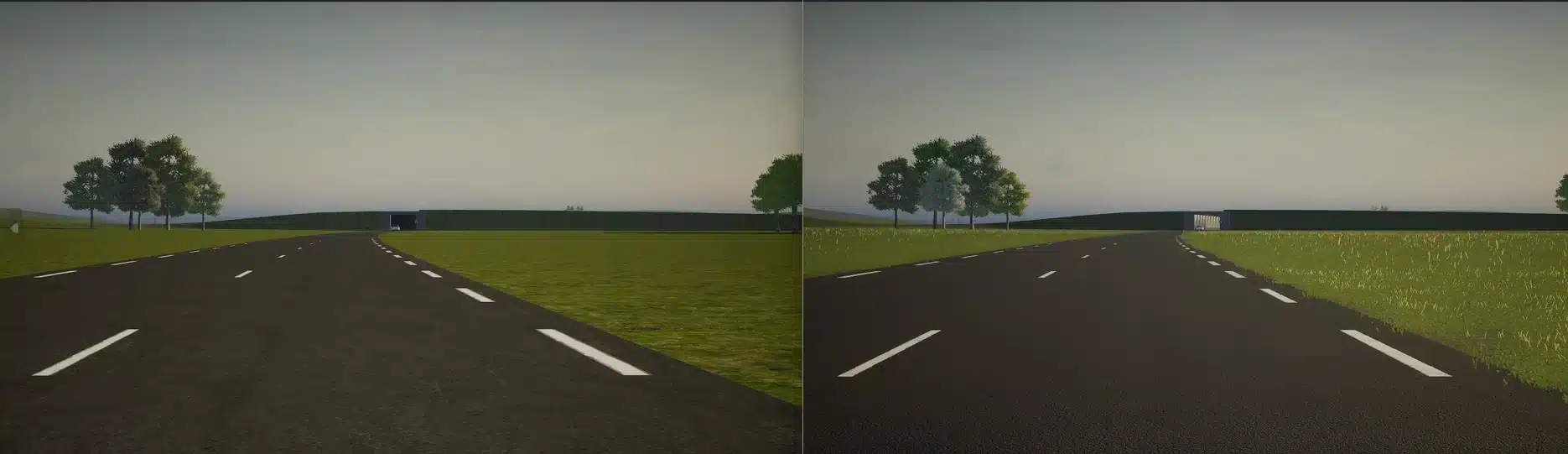
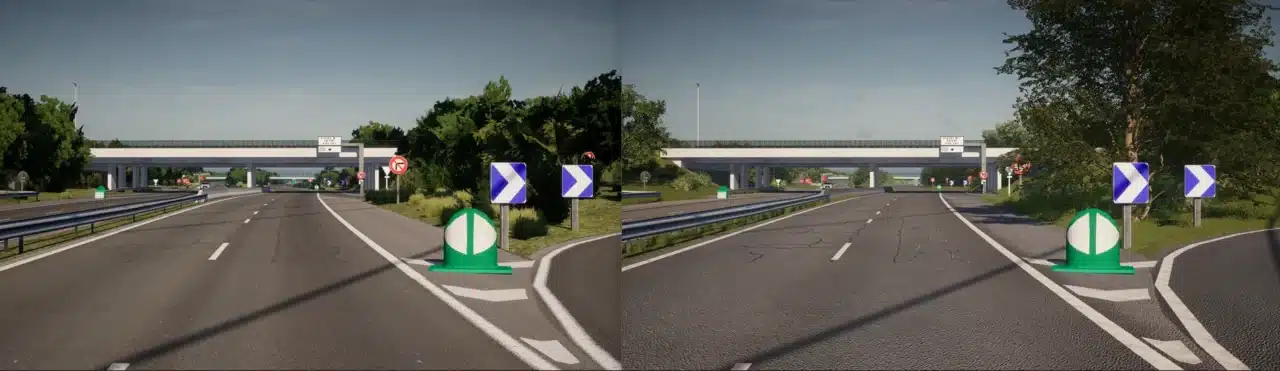
3D環境
パートナーのAgility3と協力して、UXDエンジン用の3D環境の一部を改善してきました。
デフォルトの環境
Rivieraの改善前/改善後


Meung2の改善前/改善後

Europe2の改善前/改善後
新規購入またはEurope2 EVO保守契約中のお客様が対象です。


N104の改善前/改善後
新規購入またはN104 EVO保守契約中のお客様が対象です。




SIMULATIONモード
新機能
ストーリーボード:新しいトランジションタイプ
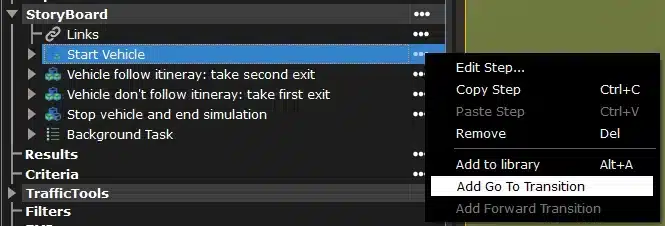
このバージョンでは、ストーリーボードに新しいタイプのトランジション、Go To transitionを追加しました。
このトランジションにより、すべての条件が有効になるため、ストーリーボードの任意のステップに進むことができます。
Go To transitionをステップごとに右クリックすると追加できます。
そして、トランジション上を右クリックすることで、Go To transitionのターゲットステップを選択できます。
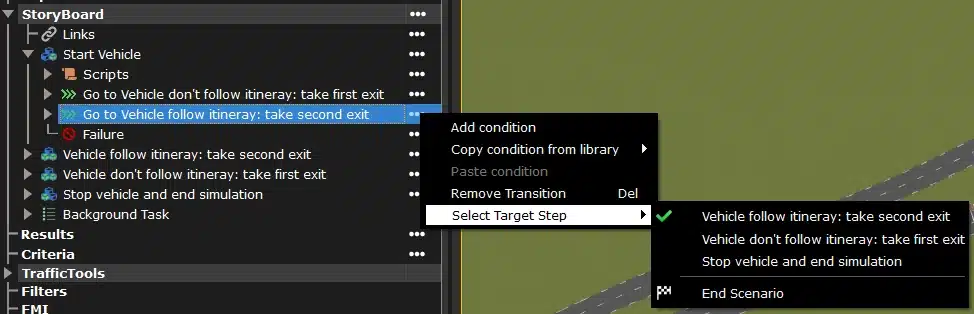
Go Toトランジションを使用したストーリーボードの例を次に示します。
Vector SIL Kitのサポート
この新しいバージョンは、Vector(https://vectorgrp.github.io/sil-kit-docs/)によって開発されたVector SIL Kitライブラリとの通信をサポートします。
RTGatewayモジュールを使用して、SCANeRとVSKレジストリ間のデータ交換が可能になります。
これは、RTGatewayフィルターで通信プロトコルとしてVSKを定義することで実現できます。
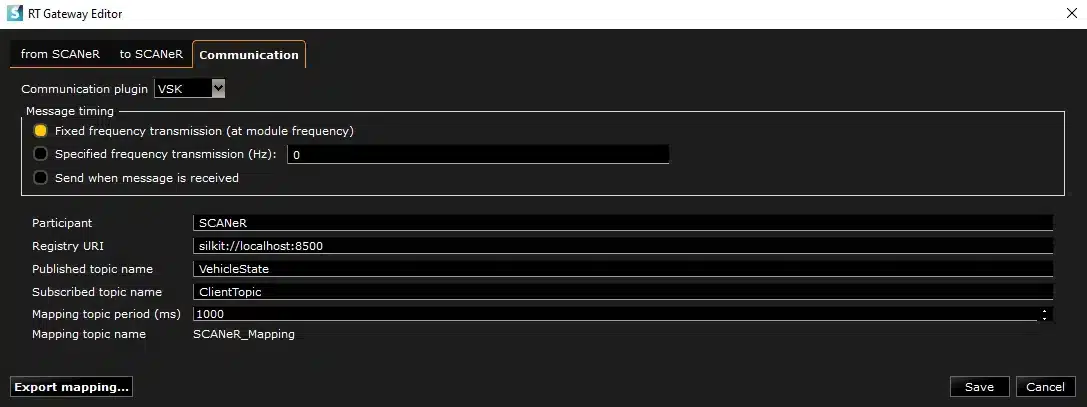
シミュレーション中、シナリオで使用される各フィルターは、新しい参加者として指定されたVSKレジストリに接続し、選択されたデータをSCANeRから他の参加者に公開します。
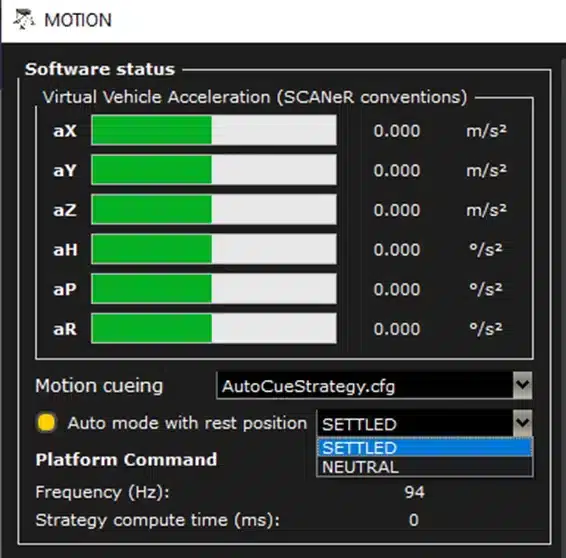
モーション設定
SCANeR 2023.3では、モーションプラットフォームを処理するための新しいオプションが追加されました。
まず、新しいオプション「Rest in Neutral position」がモーションパラメータで利用可能になりました。このオプションを有効にすると、プラットフォームは2つのシナリオの間で、定位置に戻るのではなく、ニュートラルの位置に留まります。その後、モーションモジュールが停止または手動で制御された場合にのみ、プラットフォームは安定した状態に戻ります。
「静止位置モード」は、シミュレーション中にモーション GUI で変更できます。
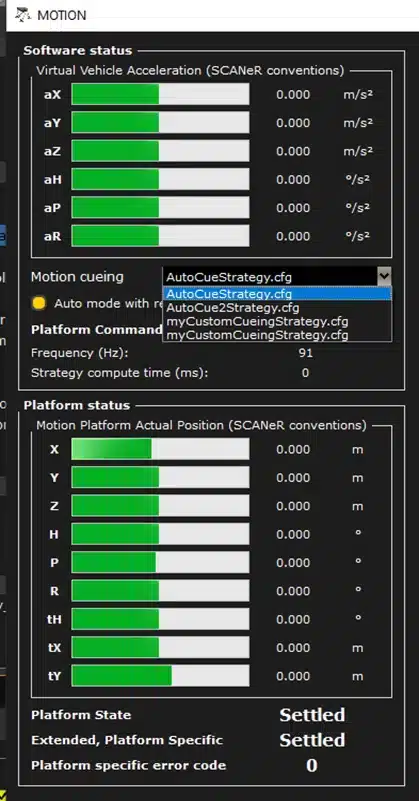
さらに、ユーザーはモーションの複数のキューイングストラテジーとコンフィグレーションプリセットを事前定義できるようになりました。
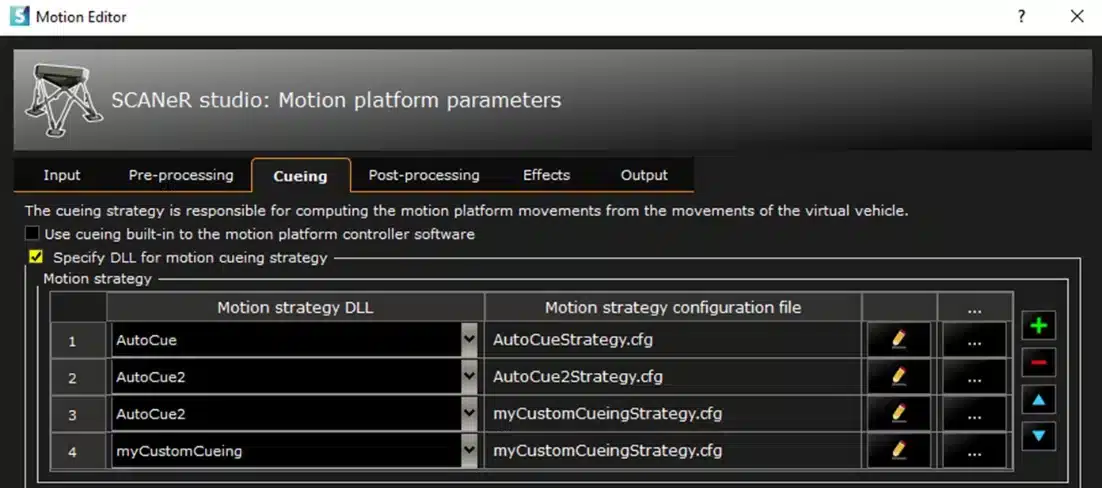
次に、シミュレーション中、エンゲージ状態ではないとき (ニュートラルまたは安定した状態など)、オペレータはモーションGUIで以前に定義されたストラテジープリセットの中からキューイングストラテジープリセットを変更できます。
これにより、オペレータは、モーションモジュールを停止したり、プラットフォームを定位置に戻したりすることなく、さまざまなキューイングストラテジーを切り替えることができます。